文章标题:The Staircase Mechanism in Differential Privacy
作者:Quan Geng, Peter Kairouz, Sewoong Oh, Pramod Viswanath
文章地址:https://ieeexplore.ieee.org/document/7093132
发表年份:2015
Abstract
通常来说我们在实现差分隐私(Differential Privacy, DP)的时候都是采用的 Laplacian 机制。但是却没人说明采用 Laplace 机制好不好,本文提出了一个叫做 Staircase Mechanism 的机制。提出的 Staircase 机制可以直接替代 Laplacian 机制。
Introduction
DP是一种隐私框架可以用来保护数据隐私。自从提出以来,DP被广泛用于各个方面。DP可以权衡数据有效性和隐私保护性(data utility and privacy)。最基本的情况可以认为是这样的:考虑一个数据查询者,他想要得到关于这个数据集的聚合信息。如果没有隐私需求的话,直接对这个数据集进行查询就可以了。为了保护隐私,需要对查询的结果进行一定处理,通常是加上一定的噪声。保护隐私的前提下,加的噪声需要满足这样的特性:数据集中任意一条记录的不同不会导致输出结果变化很大。这样即对数据集进行了查询又保护了每条记录的隐私。
形式化上,对数据集的查询可以认为是这样一个实值查询:
其中,$\mathcal{D}$ 表示可能的数据集。
为了达成保护隐私情况下进行查询,我们需要额外引入一些知识,首先是差分隐私:
机制 $\mathcal{K}$ 是 $\epsilon$-DP 的,如果对于任意相邻数据集 $D_1, D_2$ 以及查询的任意输出 $S \subset \operatorname{Range}(\mathcal{K})$ 有:
一组查询可以实际上写成这样的形式:$q(D)=\left(q_{1}(D), q_{2}(D), \ldots, q_{d}(D)\right)$
为了了解查询的性质,我们还需要了解查询的敏感度,敏感度的定义如下:
对于查询 $q : \mathcal{D} \rightarrow \mathbb{R}^{d}$,其敏感度定义为:
通常来说,最标准的满足DP的方法是再买个查询后面加上一定的噪声,即机制 $\mathcal{K}$ 为:
其中,每一个查询后面的 X 表示加如的噪声,通常来说,我们采用拉普拉斯机制作为噪声。结合查询的敏感度,机制 $\mathcal{K}$ 可以写成如下形式:
以上的拉普拉斯机制目前被作为DP的最基本方法广为使用。然而并没有对 Laplace 进行优化的相关工作。本文中,我们提出了一种可以替代 Laplace 的方法,满足同样的 DP 保护程度下,我们的方法所添加的噪声更小。
Staircase Mechanism
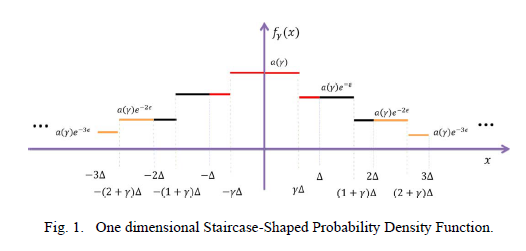
我们定义了一个多维对称分布的概率分布,其图像呈阶梯状,因此称为 Staircase 机制。给定 $\gamma \in[0,1]$,我们定义 $\mathcal{P}_ {\gamma}$ 为概率分布,其概率密度函数为 $f_{\gamma}(\cdot)$:
当然,为了满足归一化的需求,需要积分等于1,然后这个参数 $a(\gamma)$ 就可以求出来等于:
根据这个公式的性质,很显然有:
也就是说,这个 Staircase 机制是满足 $\epsilon$-DP的。
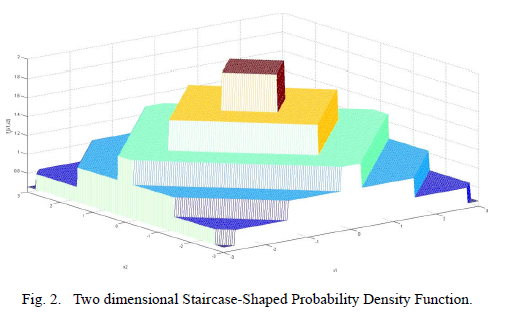
那么这个概率分布到底长啥样呢,下面的图1和 图2就展示了一维和二维情况啊下的一个概率密度函数。
有了这个概率密度函数之后,究竟如何根据这个概率密度函数生成一个随机噪声呢?作者给出了算法1,如下:
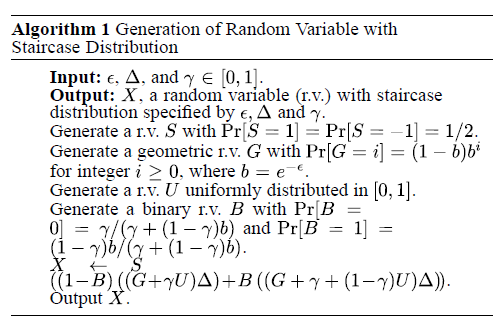
其中,S决定了这个噪声的符号,G决定了噪声在区间 $[G \Delta,(G+1) \Delta)$ 中,B决定了噪声在区间的前半部分 $[G \Delta,(G+\gamma) \Delta)$ 还是后半部分 $[(G+\gamma) \Delta,(G+1) \Delta)$,然后 U 是用来在区间随机化采样。根据这个过程,我们就产生了一个 Staircase 的噪声分布了。
Comparison with Prior Work
在目前现有的工作中,一般采用方差或者噪声的期望来衡量 DP 在数据有效性和隐私性的权衡。我们在之前的文章 [3] 中证明了在最小化代价函数的前提下:
- 为每个查询添加独立的噪声是最优的
- Laplacian 分布并不是最优的噪声添加函数,最优的噪声添加函数应该是类似阶梯状的。
Optimality of Staircase Mechanism
前面说了,满足隐私保护的查询机制可以表示为:$\mathcal{K}(D)=q(D)+X=\left(q_{1}(D)+X_{1}, \ldots, q_{d}(D)+X_{d}\right)$,其中 X 表示加在查询结果上的噪声,那么在 DP 的要求下,有:
其中,$S^{\prime} \triangleq S-q\left(D_{1}\right)=\left\{s-q\left(D_{1}\right) | s \in S\right\}$。因为我们有 $\left|q\left(D_{1}\right)-q\left(D_{2}\right)\right|_{1} \leq \Delta$,所以,根据上式,有:
根据给定的概率密度函数,我们有:
为了衡量方法的有效性,我们定义了一个 cost 函数,为:$\mathcal{L}(\cdot) : \mathbb{R}^{d} \rightarrow \mathbb{R}$。那么这个 DP 的优化问题就等价于下式:
其中 $\mathcal{P}(S)$ 表示概率 $\operatorname{Pr}[X \in S]$,上式的意思就是在满足 DP 的前提下最小化给定的代价函数。所以这里当然有一个问题就是代价函数是啥。当然,不同的应用环境可能有不同的代价指标。作者给出了这样一个代价函数:
再假定 $\mathcal{S P}$ 是所有满足条件的概率分布,那么本文的主要贡献就是证明了对于这个 L1 代价函数,我们的 Staircase 机制是最优的。即定理1:
对于 $d=2$ 以及 $\mathcal{L}(\mathbf{x})=|\mathbf{x}|_{1}, \quad \forall \mathbf{x} \in \mathbb{R}^{2}$,那么:
这个证明的过程就不仔细展开了,我也没有逐一推敲,感兴趣的读者可以参考原文。上述定理只针对了二维的情况,同样作者给出了定理2,说的是对于 $d > 2$,Staircase 依然是最优的。
Implications
我们已经知道 Staircase 是最优的了,那么 Staircase 里面有三个参数:$\epsilon, \delta$ 和 $\gamma$。其中 $\epsilon, \delta$ 我们是 DP 要求和查询函数的固有性质,不可更改。那么 $\gamma$ 该怎么取呢?作者沿用了之前自己的论文,说 $d=1$ 的时候该这么取:
对应的噪声的 amplitude (这个东西可以理解为平均的误差吧)是:
与之对应,如果采用 Laplace 的化,其 amplitude 为:
然后作者比较 $V\left(\mathcal{P}_{\gamma^{*}}\right)$(这篇文章目前没有看到这个东西咋算出来的),说很显然当 $\epsilon$ 很小的时候,Laplace 是 asymptotically optimal 的。二者的差是:
当 $\epsilon$ 较大的时候,有:
这一章节是对 Staircase 机制的一些分析,由于我没有参考给出的引用论文,这里暂且只给出了作者文中的结论了。作者还给出了一些分析,就不细说。
其他章节
后面的章节给出了证明的一些细节,在这里就不展示出来了。如果以后有用的话,再来回顾。
个人总结
机制的最优性一直广受研究。一般提出一个新的机制的时候,都是和已经存在的机制去比较,发现实验效果更好以此来说明新提出的机制拥有更好的效果。证明机制的最优性,大家其实都想去证,但是更加 challenging。这篇文章的具体证明过程我并没有逐一推敲,但是给了我们一定的启发。
当然,这么读文章是不够的,本文的主要贡献本就偏理论,这篇文章只是粗读了一下,更应该深入去了解作者对于最优的证明的。
本篇内容到这里就结束了,欢迎关注公众号《差分隐私》,获取更多前沿技术。